| No.119 2008年3月上旬号 (3月13日発行) 写真はクリックで拡大 | |||||||||
RC ヘリ 講座 (6) ヘリの飛行原理(その3)
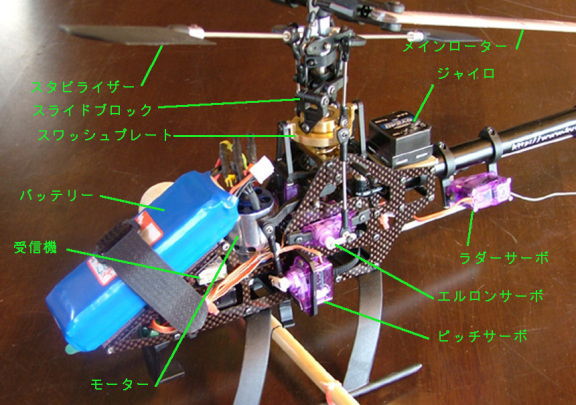
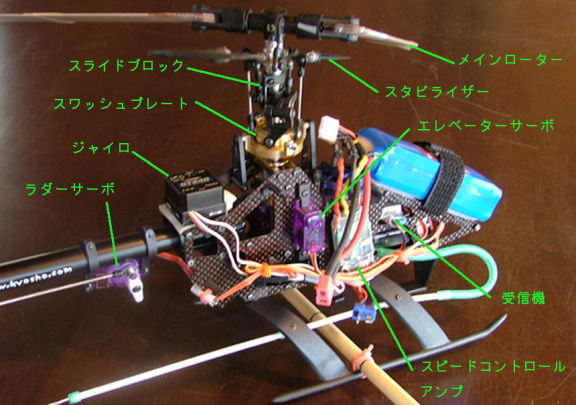
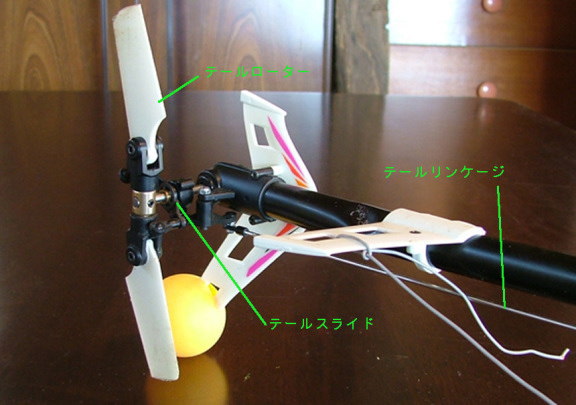
コレクティブピッチ制御 メインローターが1回転する間の全ての位置において、同じようにローターのピッチ角を 増減させる事によって、上昇、下降、加速、減速させるのが、コレクティブピッチ制御である。 コレクティブピッチ制御はプロポから制御される、ピッチサーボの動作によって行われる。 ピッチサーボからリンケージされたスライドブロックやスタビライザーを経て、 ローターにひねりが加わり、ピッチ角の増減が行われる。(写真下段の左を参照) サイクリックピッチ制御 メインローターが1回転(360°)する間に、180°の位置で、ローターが 逆方向にひねられる事によって、ヘリを前進や後進、左右への移動をさせる制御が、 サイクリックピッチ制御である サイクリックピッチ制御はプロポから制御される、エレベータサーボと エルロンサーボの動作によって行われる。 サーボからのリンケージによって、スワッシュプレートに、前後・左右の傾きが与えられる。 さらに、スワシュプレートからリンケージされたスタビライザーを経て、 ローターにひねりが加わり、ピッチ角の増減が行われる。(写真下段の左、中を参照) スタビライザー 不規則な風の影響などによって、機体が前後左右に傾いた場合、 元の位置に戻すように制御するのが、スタビライザーである。 スタビライザーは、ローターと同じように、メインマストを軸に回転しているが、 回転する左右のおもりの慣性力によって、急激な傾きが阻止される。 このスタビライザーからのリンケージによって、ローターは元の位置に戻るような ピッチ角が与えられる。 ヘリの回転制御 メインローターが回転すると、その反作用でローターとは逆方向に機体は回転しようとする。 この回転を阻止するのが、テールローターで、 プロポから制御されるラダーサーボからのリンケージによって、 テールローターのピッチ角が増減する。 ピッチ角を増やせば機体は右回転(機体の上から見て)し、ピッチ角を減らせば、 機体は左回転する。(写真下段の左と右を参照) ジャイロ ヘリが横風を受けた場合などに、テールが横向きに流され、機体は回転しようとするが、 この回転を阻止するのがジャイロである。 ジャイロはテールの回転角を計算し、復元するための制御信号をラダーサーボへ 送信することによって、姿勢を元の位置に戻すように制御している。 ローターの回転のみで、上下・前後・左右・回転方向に動くヘリは、 その機構は複雑で、解かりにくい。 再度『ローターの回転でナゼ飛行できる』のサイトをご覧ください。 次回に続く。 |
|||||||||
| 本(半X) |
編集後記とWhat's New | ||||||||
真田太平記(9) 二条城
息・徳川秀忠に二代将軍の座をゆずり 大御所となった家康は、 慶長16年(1611年) 5万の大行列で、駿府を発し、 上洛の徒についた。 この時、家康70歳、秀忠33歳、 九男義直12歳。 豊臣秀頼は、淀君らの反対をおして、 加藤清正や浅野幸長等に付き添われ、 大阪城から上洛し、京都の 二条城で家康と対面した。 出迎えた家康は、 堂々たる体躯と19歳の若さにみちた 端正な顔をした秀頼に接し、 笑顔で迎えたものの その目は笑ってはいなかった。 加藤清正や浅野長政、 そして九度山の真田昌幸ら大阪恩顧の 大名が次々と死去するにあわせて、 これより、家康の秀頼つぶしの計画が 着々と進行していく。 |
ヘリ道 屋外用ヘリの飛行練習に励んでいるが、 シングルローター方式のヘリは、 同軸反転方式のヒロボー製室内用 XRB−SRに比べて不安定で、 また機体が大きい分恐怖を感じ なかなか思うように操縦できない。 (まだケツホバの段階である) それでもすこしずつ練習が大胆に なってきて、着地に失敗しては 部品をよく破損させている。 京商製EPキャリバー400 シュワイザー300C(第1号機)に加えて、 ほぼ同じ構造の 京商製EPキャリバー400XPを 第2号機に加えて、2台体制になった。 1台で修理しながら、もう1台で 練習したいとのもくろみであるが、 現在は、2台共に破損させ、 修理の部品待ちの状態である。 ハーモニカ 地域の公民館活動として、 ハーモニカ教室が開かれている。 子供の頃、 我流でハーモニカを吹いていた記憶もあり 昨年の年末から、月に2回のこの教室に 行っている。 最近はだんだんと難しくなってきて、 落ちこぼれそうである。 |
||||||||

| No.120 2008年3月下旬号 (3月28日発行) 写真はクリックで拡大 | ||||||
RC ヘリ 講座 (7) ヘリの飛行原理(その4)
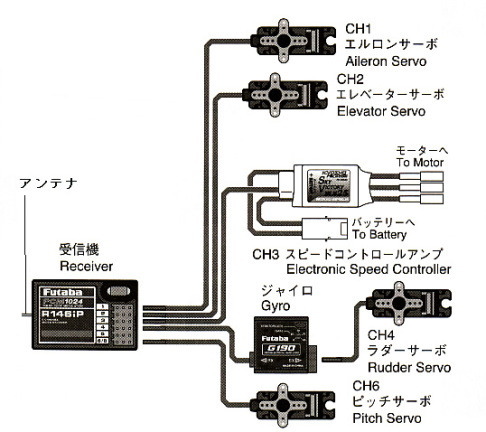
RC電動ヘリコプターの電気系統はどのようになっているのであろうか。 写真左がヘリ制御用送信機で、写真右が機体側の受信機系統である。 プロポ RCヘリコプターを操縦するための送信機(写真左)で、 プロポーショナルシステムを略して、一般的にプロポと呼ばれる。 左右のスティック(レバー)の動きが、アンテナから電波で、機体の受信機に伝達される。 右のスティックを上下に動かして、モータの回転とピッチサーボを制御し、 左右に動かして、エルロンサーボを制御する。 左のスティックを上下に動かして、エレベーターサーボを制御し、 左右に動かして、ラザーサーボを制御する。 受信機 機体に取付けられ、プロポの操作信号をアンテナで受信し、 各サーボに配線され、サーボの動作によって機体が制御される。 サーボ 正式にはサーボモーターと呼ばれるもので、受信機から出される電気信号を、 モーターを使って出力軸に機械的回転運動を与えている。 回転運動は機械的リンケージによって、ヘリの機構へ伝達される。 スピードコントロールアンプ (略してスピコンとも呼ばれる) バッテリーからモーターへ流れる電流を、受信機からの信号によって制御している。 モーターが消費する電力に見合ったアンプの電流容量が必要である。 ブラシモーター用とブラシレスモーター用とは構造が異なっている。 バッテリー モーターに電力を供給する電池である。 繰り返し使用できるように、充電式のバッテリーが使用される。 ニッカドバッテリーやニッケル水素バッテリ、リチュームポリマーバッテリー(リポバッテリー) 等の種類があるが、最近は小型で大容量のリポバッテリーが増えている。 プロポにも電池が必要で、普通単三電池が8個(12V)使用される。 モーター モーターは永久磁石とコイルに正負交互に流れる電流との電磁力によって回転し、 ヘリの飛行動力となる。 モーターはブラシモーターとブラシレスモーターに分類され、 ブラシモーターはコミュテーターの接触面にブラシがあり、ブラシによって、 コイルに正負の電流が供給される。 ブラシレスモーターにはブラシが存在せず、アンプから正負の電流が供給される。 ブラシが無い分抵抗が小さく、高出力のモーターとなる。 ジャイロ 風などの外力によって機体の向きが変化した場合、その回転角を算出し、 元の位置へ機体を戻そうとラダーサーボに信号を送る。 |
||||||
| 本(半X) |
編集後記とWhat's New | |||||
真田太平記(10) 大阪入城
豊臣方は京都において地震によって 崩壊した方広寺と大仏を再建中であった。 徳川家康は この大仏殿の大梵鐘の鐘銘の中に 『国家安康』と『君臣豊楽』という 言葉を見つけ、これは家康の名を『安』の 一字で切断し、豊臣家を君主として 末長く楽しむという意味であり、 『この鐘銘は徳川家に呪をかけ、 調伏せんとしている』という言いがかりを 豊臣側に吹っかけたのである。 かくして、関ヶ原の戦いから14年後の 慶長19年12月(1614年)、 大阪冬の陣の合戦が始まった。 東軍は二百に近い大小名をあわせて、 約20万の大軍、 西軍は浪人らの寄せ集めの約10万の 兵であったという。 大阪城に入城し、徳川家康を苦しめた 真田幸村の善戦もむなしく、 休戦となったが、休戦の誓紙交換の 翌日には、徳川家康は 『すぐさま、城の外濠を埋めよ』との 命令を発した。 |
ヘリ道
彼岸を過ぎて急に 昼間は大分暖かくなってきました。 桜の芽もふくらんできて、あと2〜3日で 開花しそうな感じです。 4月5日は近所で花見です。 屋外用ヘリ EPキャリバー400XPを2号機に加えて、 連日、風の少ない朝のうちに 飛行練習に励んでいます。 上の写真の様に、 転倒防止に取付けていたアメンボウを 取り外しました。 機体の振動が少なくなったように感じ、 このところ好調です。 ケツホバからすこしづつ横を向けて、 横ホバの練習を始めていますが、 少し無理をすると、 落としてしまいますので、 あまり急がずにボチボチです。 |
|||||