|
マイロボット(はじめに) 2006年2月記
|
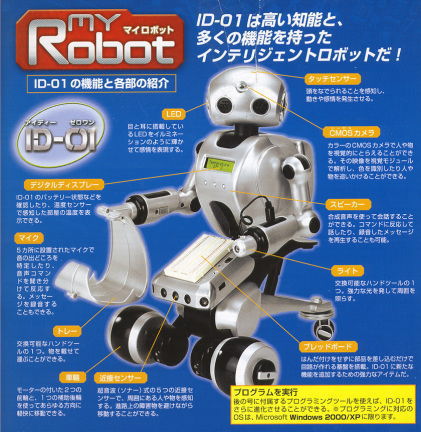
| ロボットの名前 | ID−01 |
| 外形寸法 | 41cm(高さ)×26cm×33cm |
| 重量 | 約2kg |
| バッテリー | 単3電池8本 |
| バッテリ使用可能時間 | 約4時間(連続) |
| 歩行速度 | 最高時速 約1.5km |
| モータ | エンコーダ付DCモータ 7個 |
| 自由度(DOF) | 7 |
| センサー | 近接:5個(発信機2個、送信機3個) タッチ(触覚):1個(頭部) 光:2個 温度:1個 |
| LED | 30個 |
| フラシュメモリ | 16MB |
| RAM | 16MB |
| メモの録音可能時間 | 約150秒 |
| 最高解像度 | 0.3メガピクセル(640×480) |
| ハンドツール | 3種類(懐中電灯、トレー) |
| 接続ポート | USBとRS232 |
| 対応OS | Window2000/XP |
| ブルートゥース | コントロール許容範囲:約10m |
| ロボットの能力 | 動きを検知し反応する 音声コマンドに反応する パソコンと相互通信できる 強力な光を放ったり物を運んだりできる パソコンでプログラミングができる(JAVA対応) |
| 1. 第1号〜第21号 写真はクリックで拡大 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
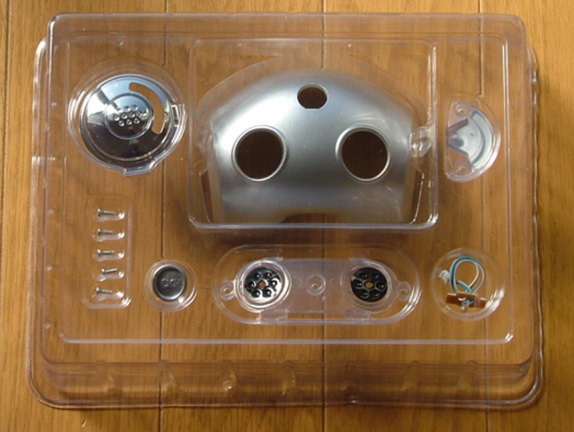
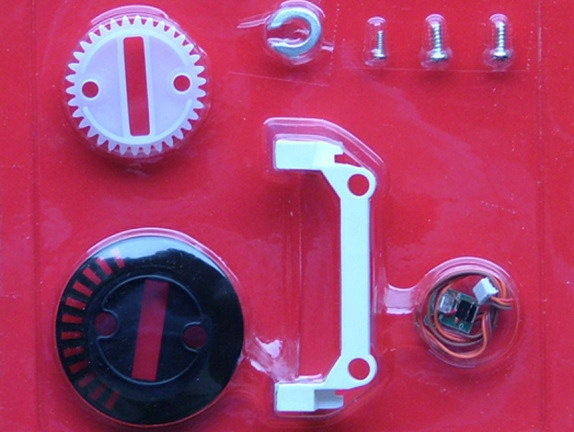
マイロボットの組立(第1号) 2006年3月記 これから順次マイロボットの組立を紹介していきたいと思っている。 このロボットのホームページによれば、マイロボットの製作過程は、1号から75号まで 分割させていて、組立の完成は、これから約1年半ぐらいかかることになる。 1年半後には、順調に組立ができれば、動きまわるロボットが完成するはずである。 今回は、最初の第1号の組立である。 1号から6号までが、ロボットの頭部の組立で、6号まで完成すると、 頭部に収納されたタッチセンサーで、頭を撫でられると自分の感情を表現するようになるという。 1号の組立は、工具は小型のプラスドライバーのみで、ものの10分もかからなかった。
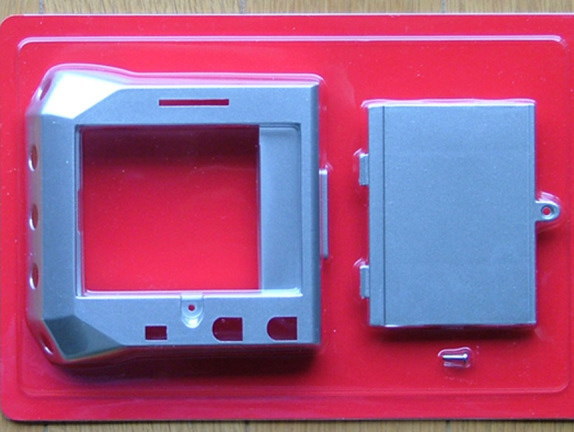
マイロボットの組立(第2号、第3号) 2006年3月記 ロボットといえば、ソニーが発売した『AIBO(アイボ)』が有名である。 1999年にロボット犬としてインターネットで発売されたAIBOは、20分間に3000体が 売切れてしまったという。 最新のAIBOでは、まるでほんものの犬のように反応し、子犬から成犬へと成長していくという。 今後の高齢化社会においては、老人のパートナーとして、介護やペットとして ロボットが活躍する時代がやってきそうである。 (AIBOは残念ながらこの3月に生産が終了したとの事である) マイロボットの第3号からは、ロボットらしく少しはメカニックな構造と組立になってきた。
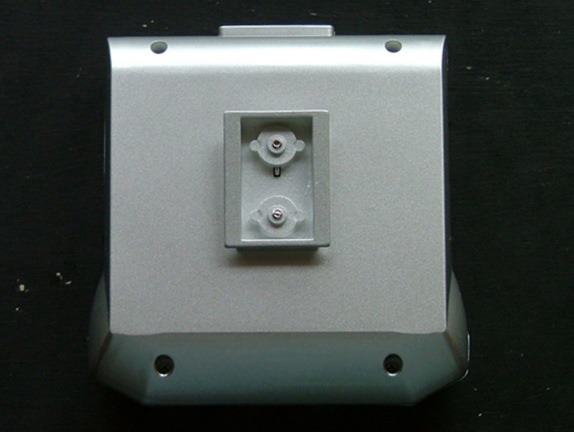
マイロボットの組立(第4号、第5号、第6号) 2006年4月記
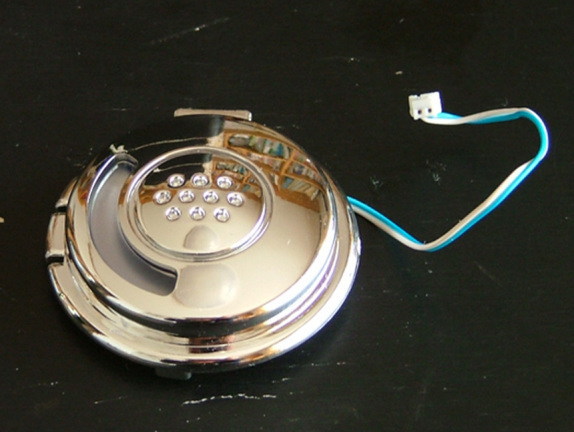
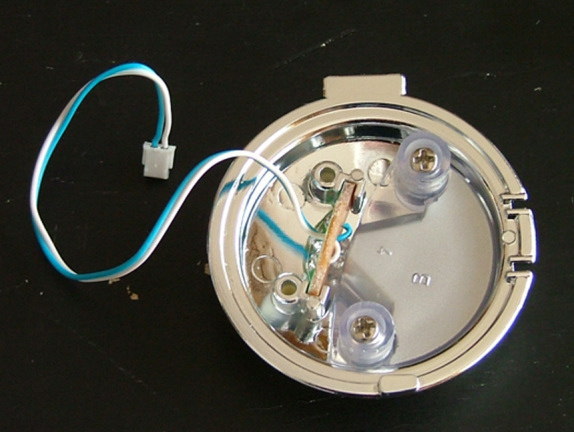
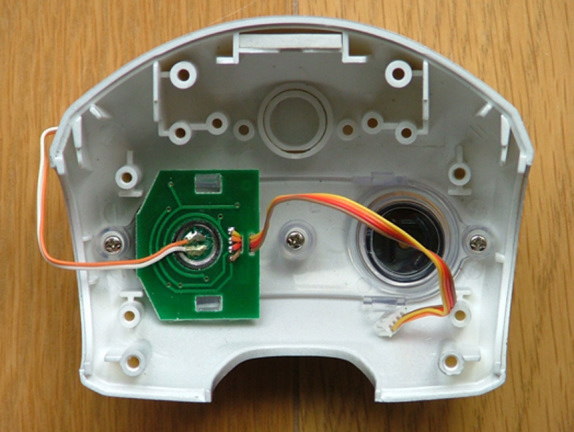
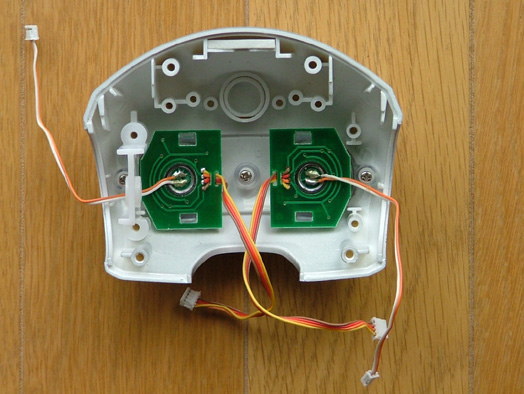
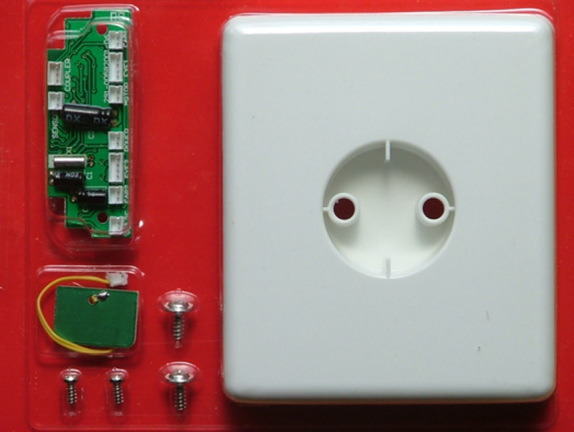
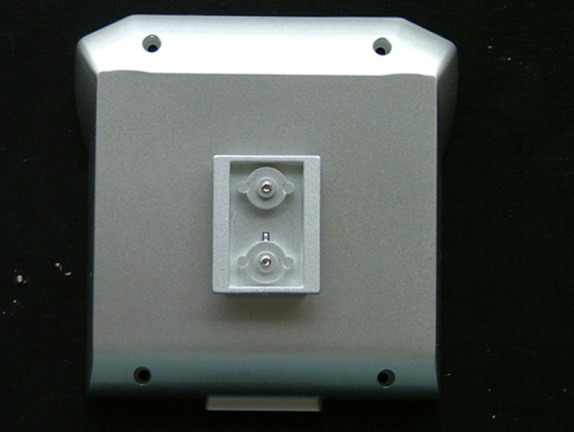
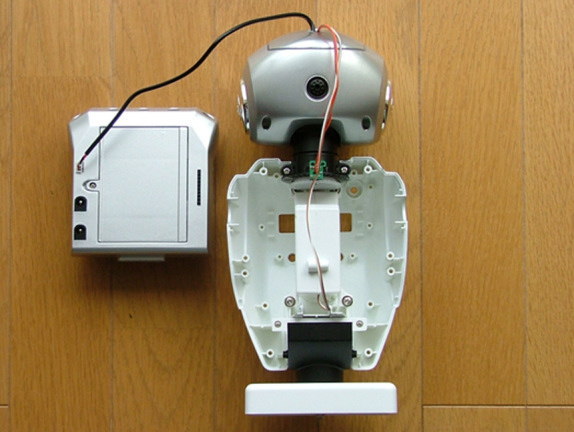
マイロボットは1号から6号までの組立が1ステージで、ここでロボットの頭部が完成する。 上の写真のように、頭部テスト用スタンドを取付けて、後頭部の電池ボックスに、 単3乾電池3個をセットすると動くようになり、頭部の動作試験が行える。 頭頂部を手の平で触れると、両目のLEDを橙と赤に点滅させ、 両耳を青色に点灯させながら、上下にうなづくような頭の動作をするようになる。 手の平の触れを検出するタッチセンサーとは、どのような原理で動作するのであろうか。 解説によると、 タッチセンサーは、実際には『静電容量変位計』と呼ばれるもので、 頭頂部に手の平を接触させると、第6巻で取付けたタッチセンサー部の 静電容量の変化を検出しているとの事である。 マイロボットのホームページの記事にしたがって、 タッチセンサー部にアルミ箔を挿入したところ、検出感度がかなりよくなった。
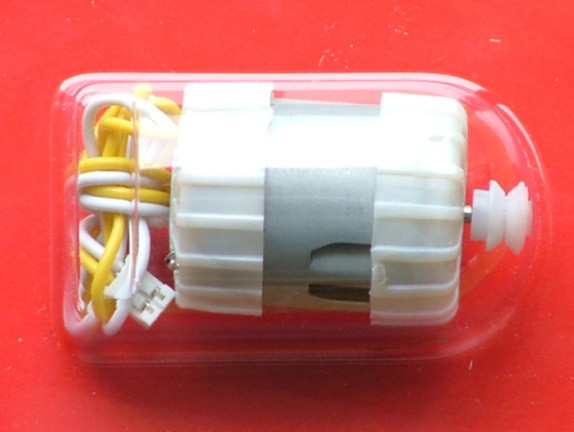
マイロボットの組立(第7号、第8号、第9号) 2006年4月記 マイロボットの組立は、第7号から新たな第2ステージがスタートした。 第7号から第14号までの第2ステージの組立が完成すると、 頭部に組込まれた複数のマイクとサウンド追跡モージュールによって、 音源の位置を特定し、頭を上下だけでなく、左右にも動かして、 音源の方向に向かって愛嬌を振りまく機能が完成するようである。 第7号から第9号は、頭部の左右運動を可能にするモーターとギアを収納する モーターボックスの組立である。 説明書通りに行えば、きわめて簡単な組立であった。
マイロボットの組立(第10号、第11号) 2006年5月記
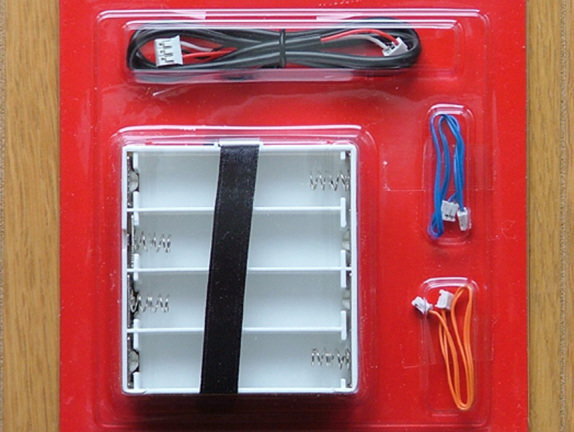
(トヨタのトランペット奏者『パートナーロボット』。写真はトヨタのHPから借用) マイロボットの組立は第11号まで進んだが、まだ目に見えるような大きな進展はない。 第10号からは、ロボットの首を左右に回す運動システムの組立が始まった。 第1ステージで組み立てたテスト用スタンドを取り外し、 ロボットの首部分に、首回転用ギア、オプチカルエンコーダーディスク、そして オプチカルエンコーダーボードの取り付けである。 第11号に付属してくる部品は、ロボットの神経系統中枢の一つとなる バッテリーケースであるが、今回は特別の組立もなく部品の確認のみであった。 上の写真はトヨタが開発したトランペットを演奏するロボットである。 2005年愛知万博で演奏デモを行ったそうで、人間の唇の動きができる 人口唇を持っているという。 演奏の状況はトヨタのホームページから動画で見られる。
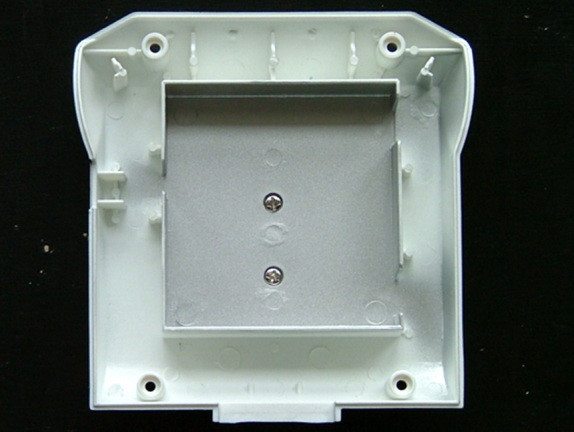
マイロボットの組立(第12号、第13号) 2006年5月記
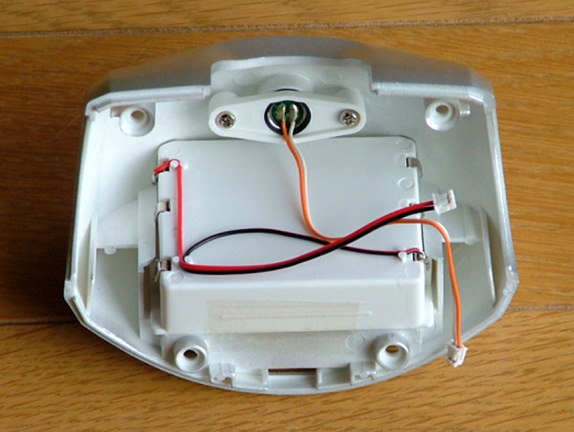
(写真はヒューマノイドロボットPINO。Open PINO PlatformのHPから借用) 11号から、マイロボットの胴体フロント部のバッテリーケースの組立が始まっている。 13号になって、メインスイッチやインターフェースボード、コネクター等が送られてきて、 それらの組立と配線に、少しはロボットの組立らしい感触が出てきた。 人間にとって、歩く、走る、跳ねる等の動作は、ごく当たり前のものであるが、 ロボットにとっては、かなり難しい動作のひとつである。 ニ足歩行ができるロボットとしては、ホンダやソニーといった大企業製のロボットが有名であるが、 上の写真は、 文部科学省関連の科学技術事業団のプロジェクトで1999年から研究開発が始まり、 2003年に完成したヒューマノイドロボットPINOである。(身長70cm、体重4.5.kg) このロボットは、安価なシステムを目指して研究されたもので、 このPINOに関する全情報(機構、電装系、ソフトウエア)は、 Open PINO Platformとして、Web上で公開され、低価格で誰もが研究に 参加できる状況になっている。
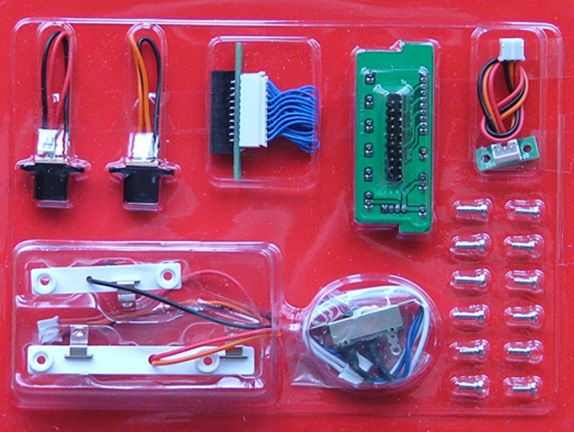
マイロボットの組立(第14号、第15号) 2006年6月記
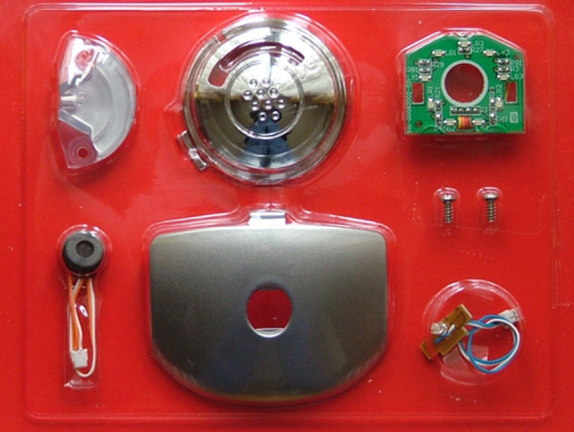
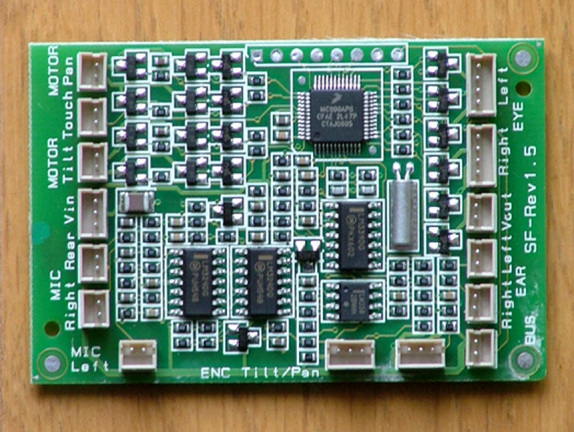
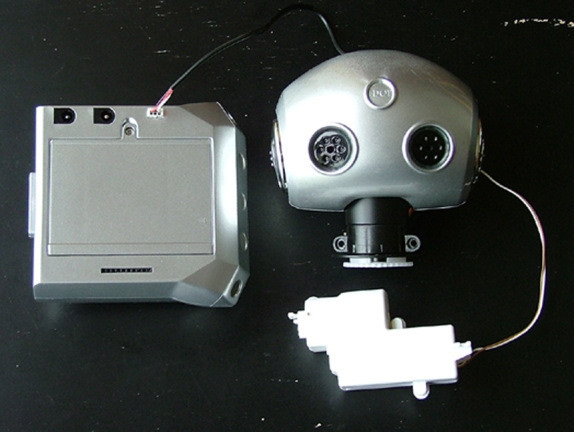
マイロボットの組立も15号となった。 15号からは、このロボットの神経や頭脳となる電子回路部品の組立となる。 15号に付属する電子回路基盤は、両目と頭部後方に組込まれたサウンド追跡用 3個のマイクから伝達される信号の制御と、頭部を動かす2個のモーターを制御する ヘッドコントローラーボードである。 さすがに電子部品となると、小さくひ弱で、慎重な作業が要求されるようになる。 とうとう、上の写真のように、バッテリーボックスからのリード線の端子を壊してしまった。 (写真左の白い端子から、リード線が抜けてしまった、差し込んでも元に戻らず) 壊れた部品を改めて購入し、組立を完了したが、 かなり細かく複雑な作業であったので、この後正常に動作するか不安がある。 (17号ぐらいで動作テストするようである)
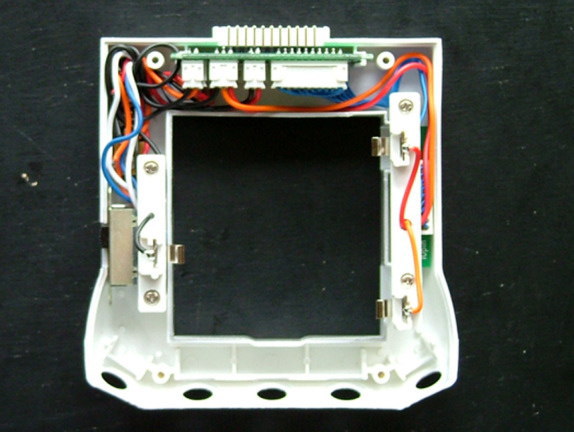
マイロボットの組立(第16号、第17号) 2006年6月記
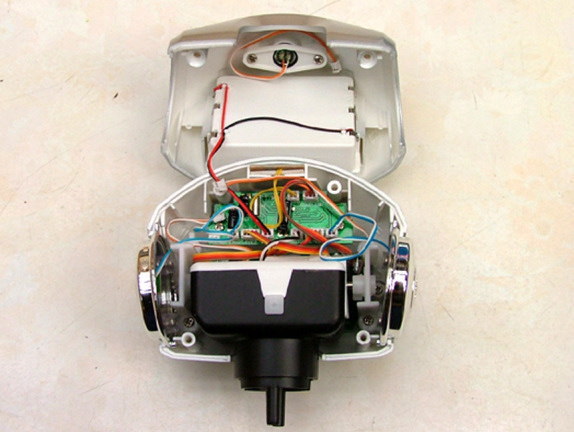
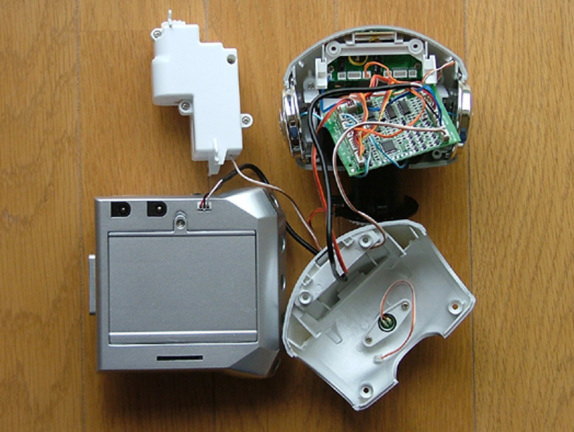
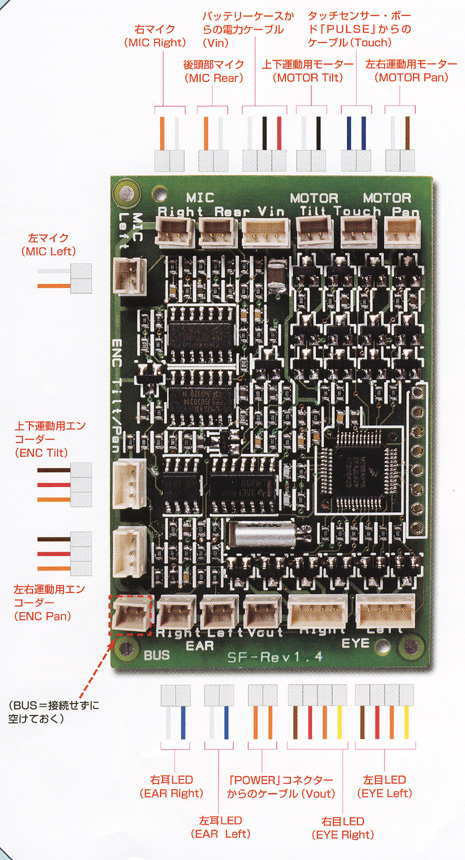
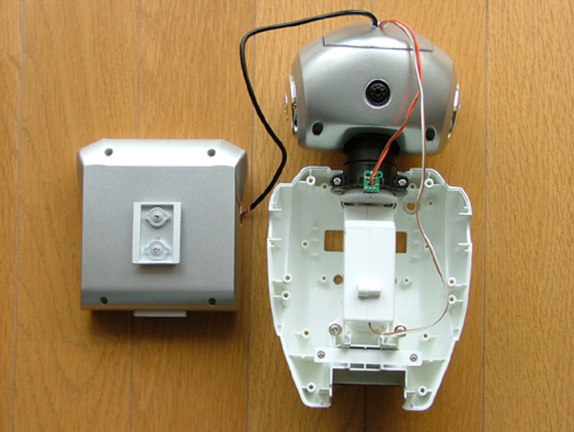
上の写真は、15号で配線した、ヘッドコントローラボード関連の接続図である。 ヘッドコントロールボードとの接続デバイスは、下記である。 マイク・・・右目、左目、後頭部に取り付けの3個のマイク LED・・・右耳、左耳、右目、左目に取り付けの4個のLED モーター・・・上下運動、左右運動用2個のモーター エンコーダー・・・上下運動、左右運動用2個のエンコーダー タッチセンサー・・・タッチセンサーボードのパルスとパワー バッテリケース・・・電源 第17号までの組立で、第2ステージの組立が完了し、頭部の機能動作試験ができるようになった。 バッテリーボックスのメインスイッチをONにすると、正常に組み立てられておれば、 次のイニシャライズ動作とサウンド追跡動作を行うはずである。 赤色(左右運動異常)を点滅させる イニシャライズを完了すると、 しかし やはり心配していた通り、メインスイッチをONにすると、両目のLEDを黄色に点滅させ 頭部の上下運動異常を表示してしまった。 再び15号で閉じた頭部を開いて、結線をチェックしたところ、 リード線が1本が端子から抜けている事を発見した。慎重にリード線を押し込んで正常となった。 現在正常に動作している。 第18号からは、第3ステージの組立が始まり、 第3ステージの組立が終わると、音声で与えたコマンドを解析し、 小型スピーカを通じて口をきくように、音声で返事をするようになる予定である。
マイロボットの組立(第18号、第19号) 2006年7月記
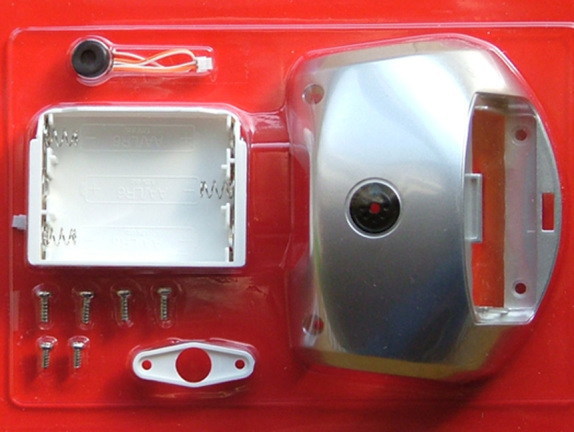
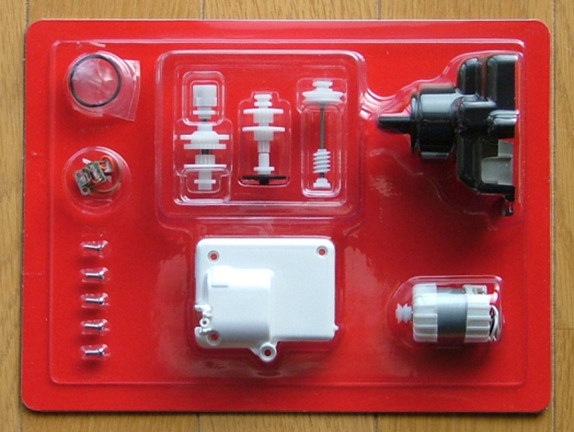
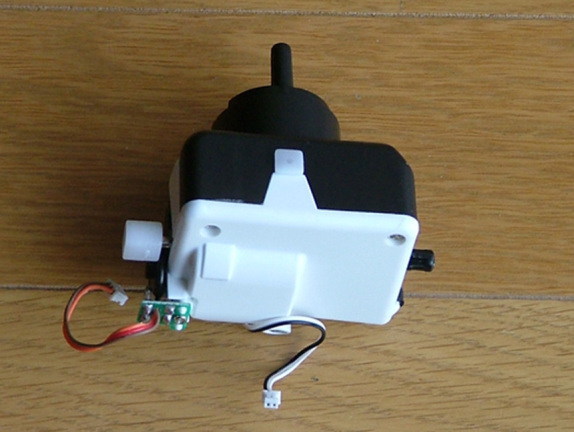
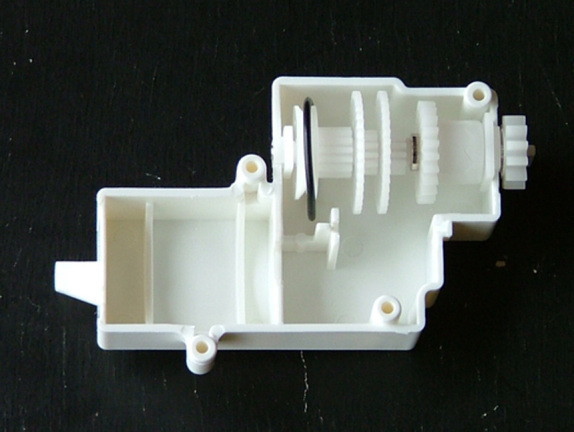
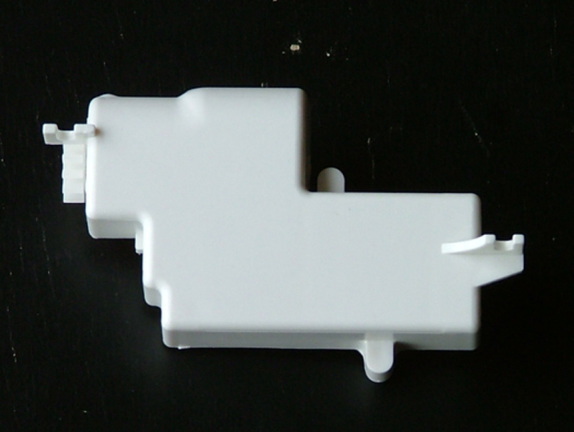
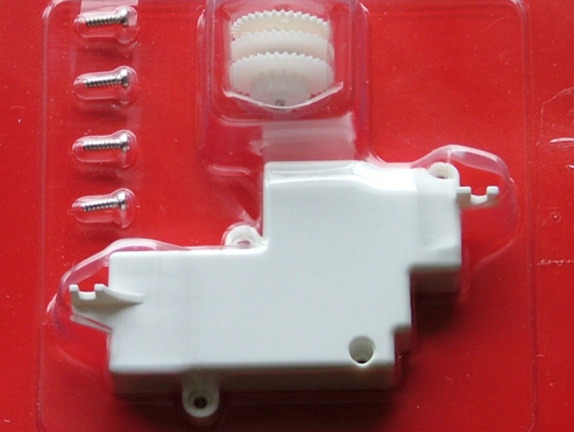
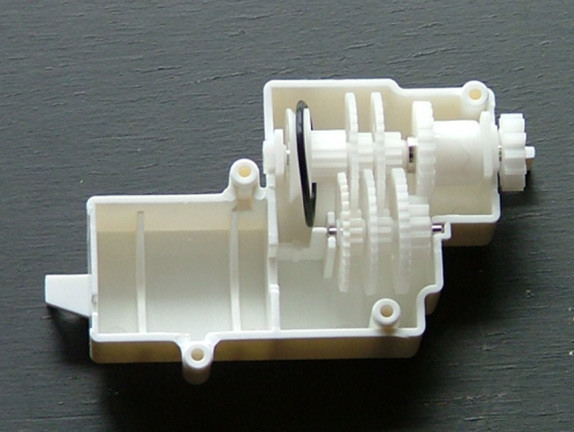
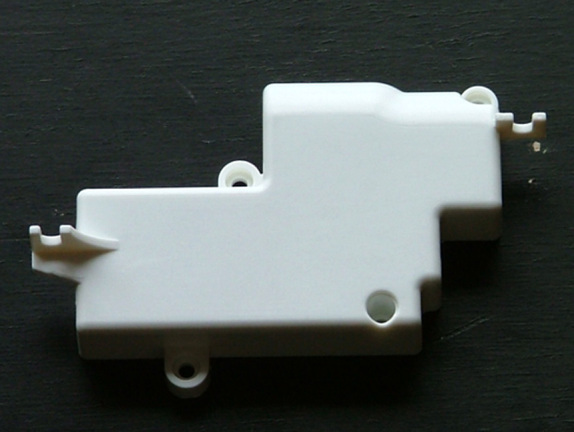
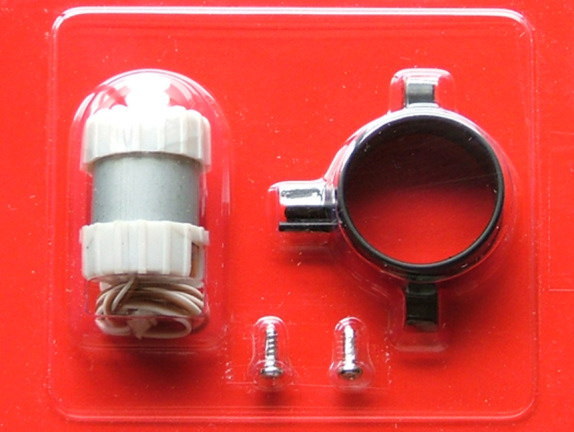
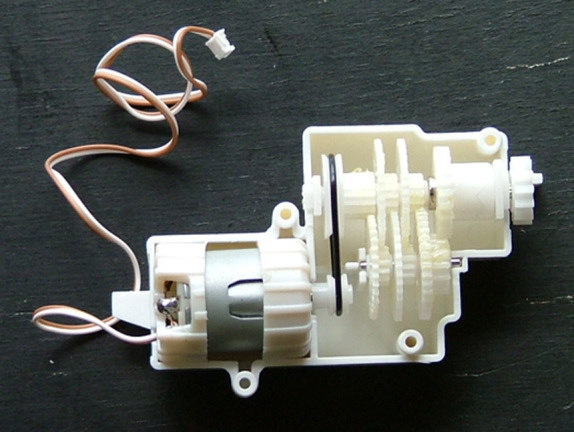
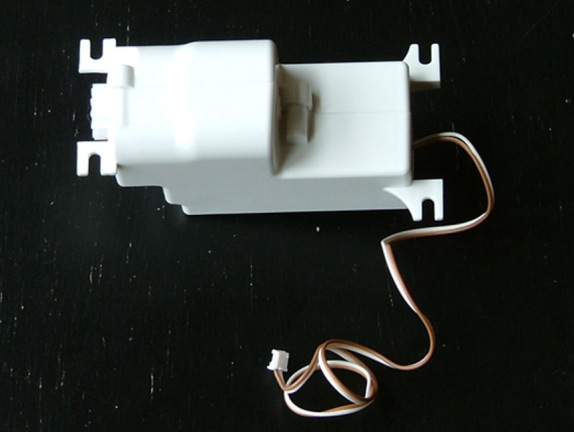
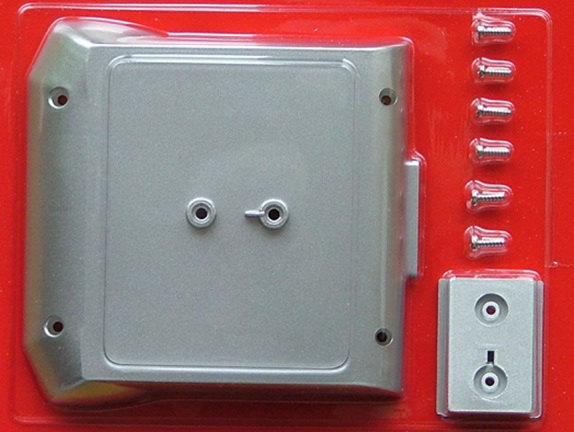
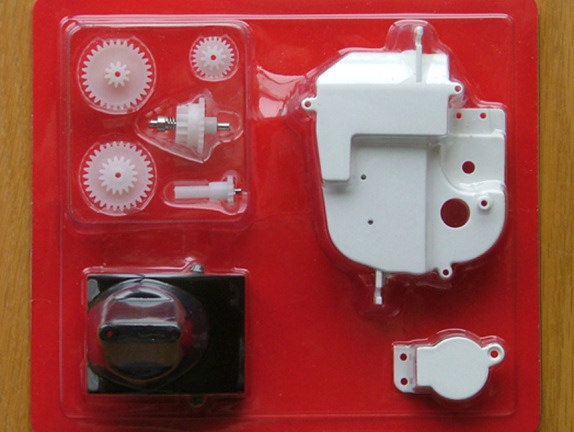
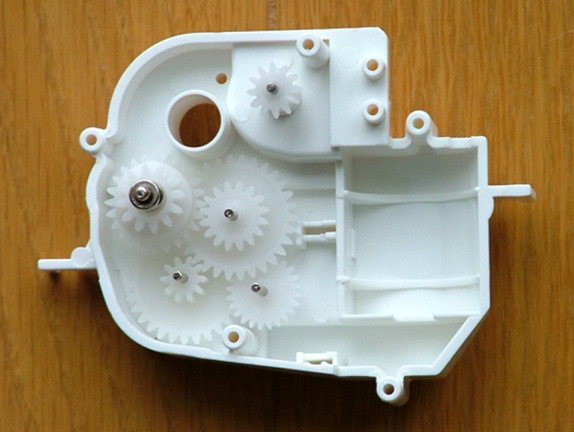
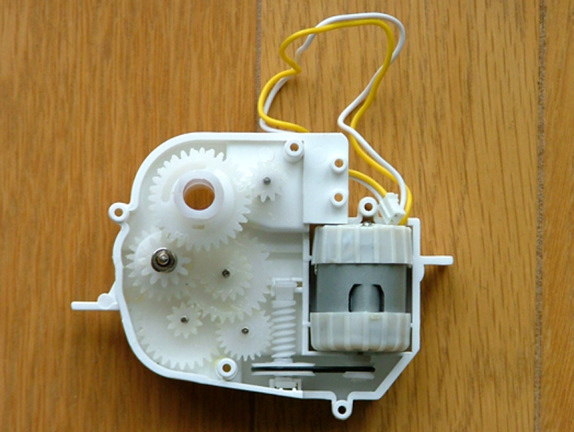
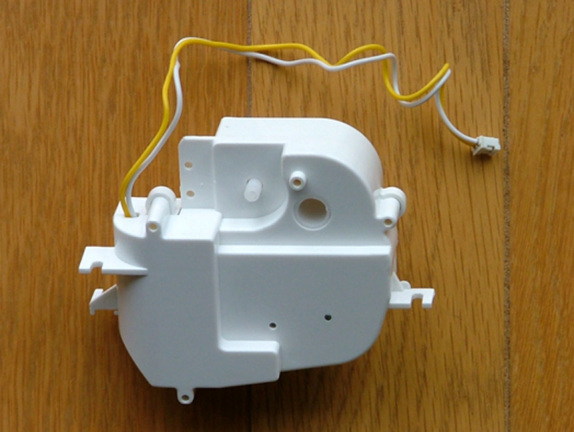
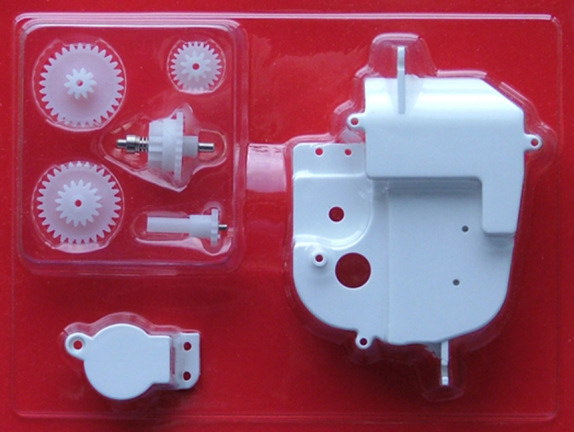
第18号から、新たなステージの組立が始まった。 第18号から第30号までの第3ステージでは、マザーボードと音声モジュールの 組立となるようだ。 まず、第18号と第19号では、左腕の駆動部の組立である。 モータボックスの中にモータとギヤ、シャフト類、ベルトを組込めば完成する。 この出力シャフトに左腕が取付られて、左腕が回転動作することになるものと思われる。 狭いモータボックス内でのギヤ類の位置決めと、ベルト掛けに手間取った。 今までの組立はとりあえず順調である。まだ、先は長い。
マイロボットの組立(第20号、21号) 2006年7月記 マイロボットの部品も第20号と21号が送られてきたが、中途半端な部分組立となるため、 部品の状態で保管中である。
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||